안녕하세요. 데이터 요리사, 루나 입니다.
자율주행 자동차는
실시간으로 주변의 객체를 인지하고, 상황을 판단해서, 차량을 제어하는
엄청난 기술의 총 집합체라고 할 수 있습니다.
이번 글에서는 주변의 객체를 인지하는 기술인
'객체인식(Object Detection) 알고리즘'에 대해서 정리해봅시다.
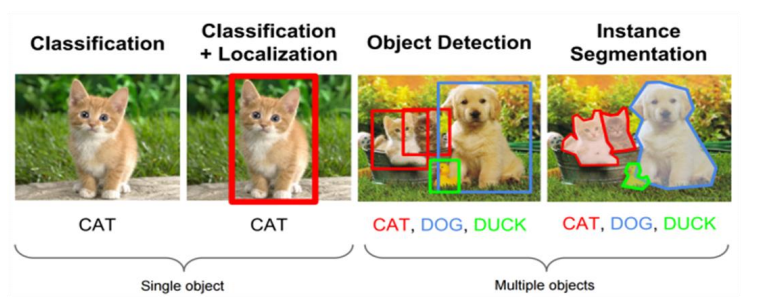
| 1 | 객체인식(Obeject Detection)이란? |
- Multiple object + Classification + Localization
- 객체인식은 결국 2 category classification 문제: O(찾고자 하는 객체), X(찾고자하는 객체가 아닌 경우)
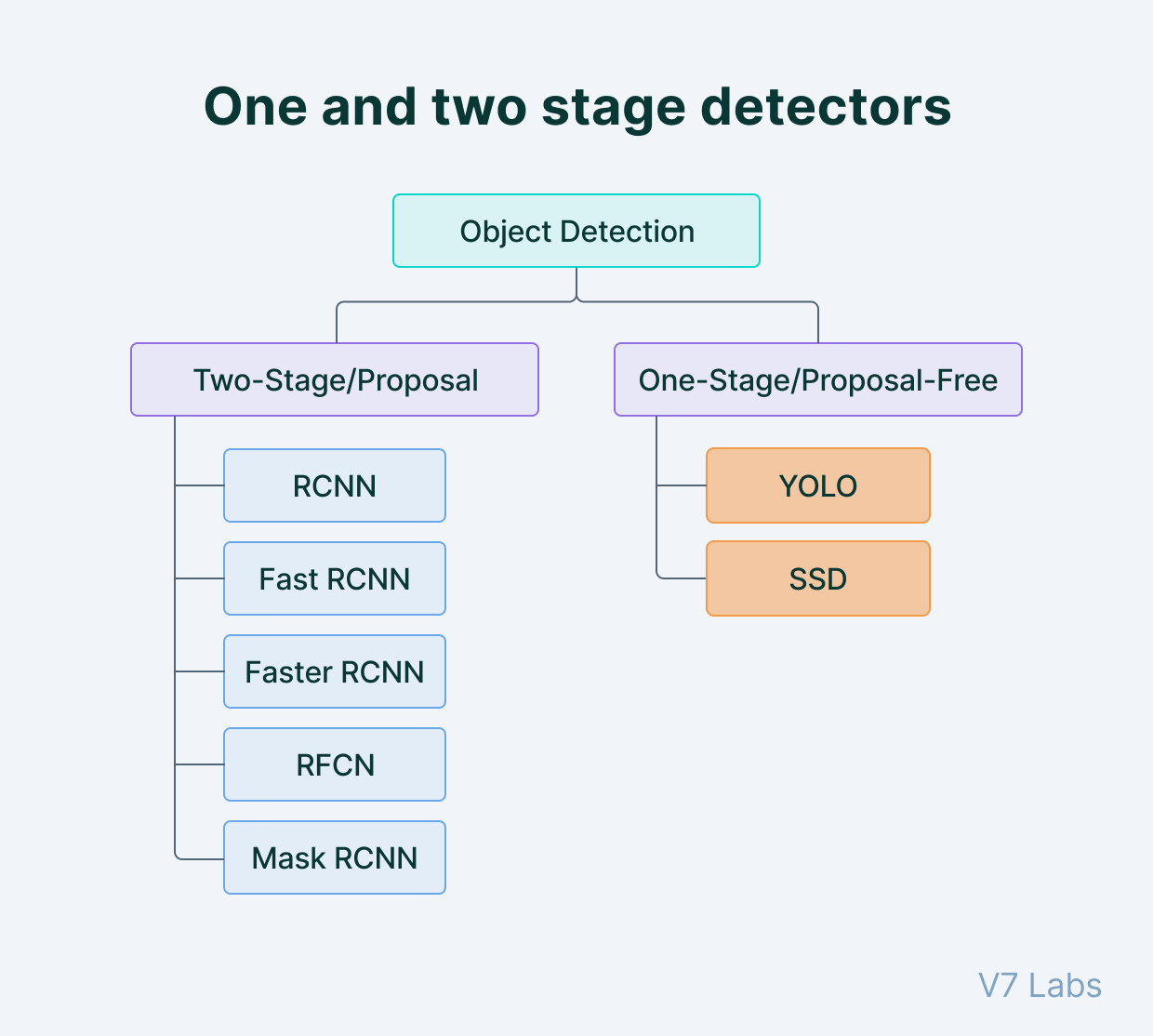
- 객체인식 분야의 주요 알고리즘
- Proposal 단계 有: RCNN(Region CNN), Fast RCNN, Faster RCNN, RFCNN, Mask RCNN
- Proposal 단계 無: YOLO, SSD(Single Short Detection)
- 객체인식 문제에서 사용하는 평가 지표
- MAP(Mean Average Precision)
- 추론시간(ms)
- IoU(Intersection Over Union)
- 0.5 보다 클 경우에만 제대로 객체 인식을 했다고(TP) 판단

| 2 | 객체인식 분야의 꽃! YOLO(You Only Look Once) 알고리즘 |
- 구조: 24 Conv. Layer + 2 FC Layer
- 입력: SxS 그리드가 포함된 이미지(사이즈: 448 x 448)
- 출력
- 각 그리드에 해당하는 바운딩 박스: x, y, w, h, confidence
- S x S x C 클래스일 확률

- 학습
- ImageNet 데이터로 사전학습(pretrain) 진행 후, 본 학습 진행
- Hyperparamete: 135 epochs, 62 batch size, 0.9 momentum, 0.0005 weight decay, 0.001~0.1 learning rate
- NMS(Non Maximal Suppression): 각 그리드에서 생성하는 바운딩 박스를 하나만 선택하는 과정
- 수많은 객체 인식 결과에 대해 확률 점수를 보고 가장 큰 점수를 선택하는 과정을 반복

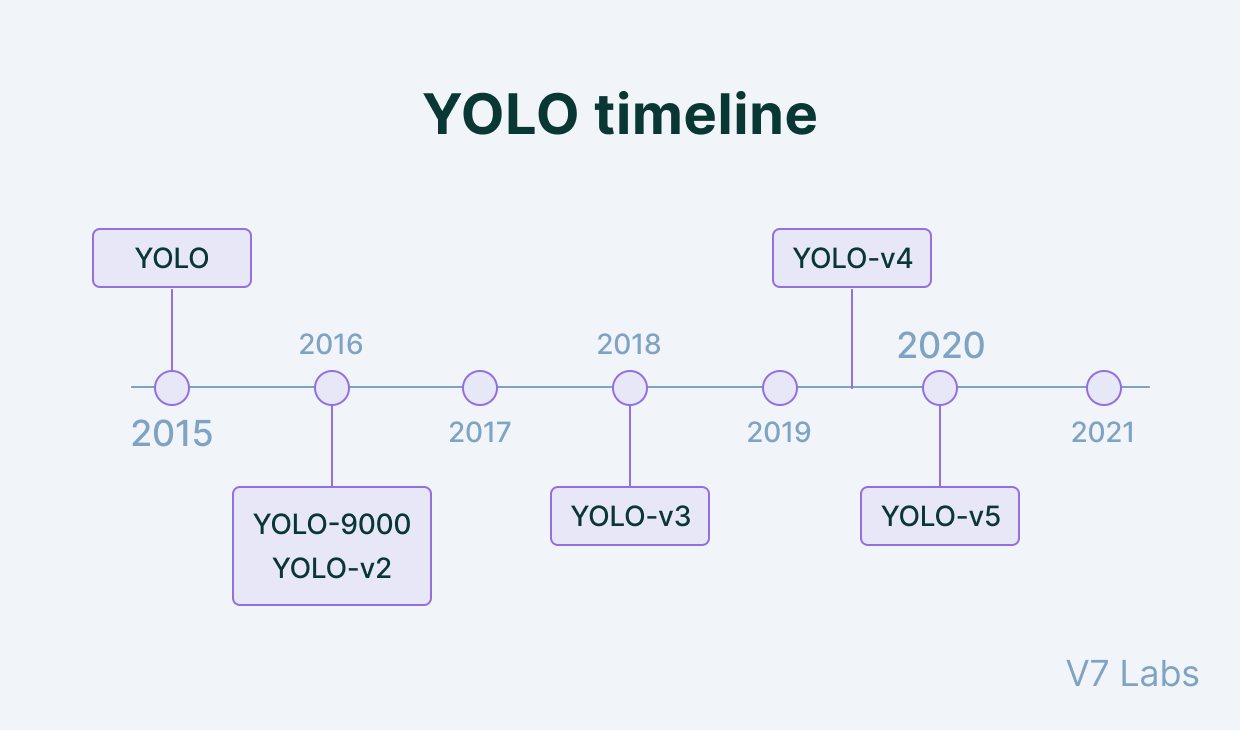
| 3 | YOLO의 변천사 |
| 함께 보면 좋은 글 |
https://hackernoon.com/understanding-yolo-f5a74bbc7967
https://www.v7labs.com/blog/yolo-object-detection
※ 이 글의 내용을 상업적으로 무단 활용, 편집하는 것은 금지하고 있습니다. 강의, 출판 등 상업적 이용이 필요하신 경우, 문의 바랍니다.
728x90
'딥러닝 > 컴퓨터비전' 카테고리의 다른 글
| [컴퓨터비전7] ResNet(ILSVRC 2015 top1) (0) | 2021.12.13 |
|---|---|
| [컴퓨터비전6]GoogLeNet(ILSVRC 2014 top1) (0) | 2021.12.13 |
| [컴퓨터비전5]VGGNet(ILSVRC 2014 top2) (0) | 2021.12.13 |
| [컴퓨터비전4]AlexNet(ILSVRC 2012 top1) (0) | 2021.12.13 |
| [컴퓨터비전3]CNN 연산 시 사용하는 메모리, 파라미터 계산 (0) | 2021.12.13 |